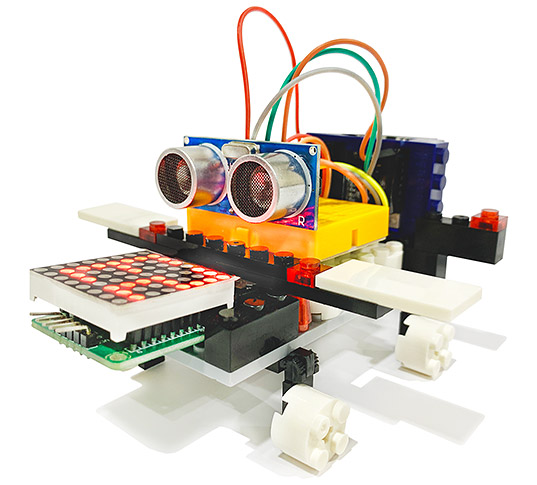
Smart 飛天車 ( 接線教學 )
當我們已經會使用積木零件組裝飛天車之後,接著就要來把 Smart 和飛天車組合,這篇教學將會介紹如何使用麵包板連接 Smart、超音波傳感器和 LED 點矩陣。
接線與實作
要操控 Smart 飛天車,首先要將 Webduino 智慧路燈積木材料包組裝完成,材料包裡頭有 Smart 樂高相容積木組,另外最重要的還需要有個 Webduino Smart 開發板,跟著組裝步驟實作即可完成。
詳細組裝參考:Smart 飛天車 ( 組裝步驟 )
接線教學
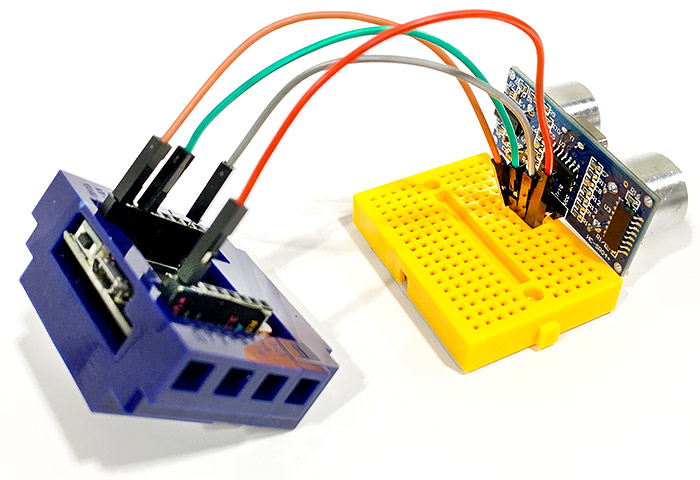
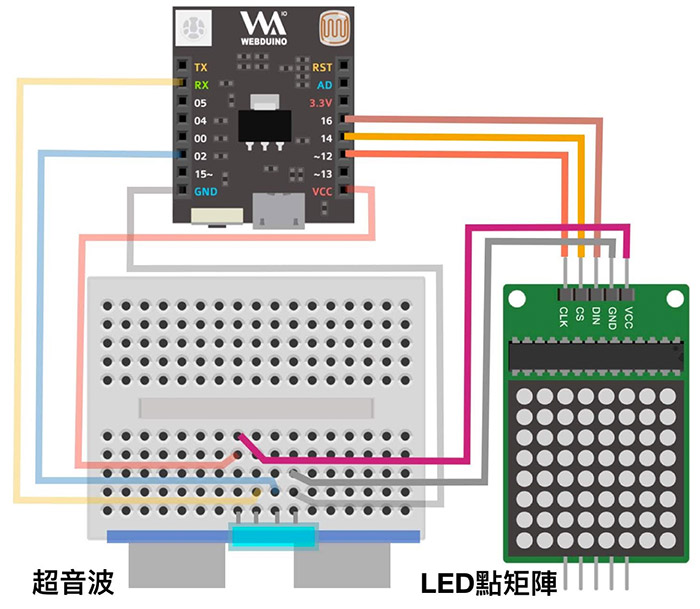
先把超音波安置到麵包板,使用 4 條公對公的杜邦線,把超音波的四條接線都接到開發板上,接線另一頭接在對應超音波的麵包板上,如圖示。
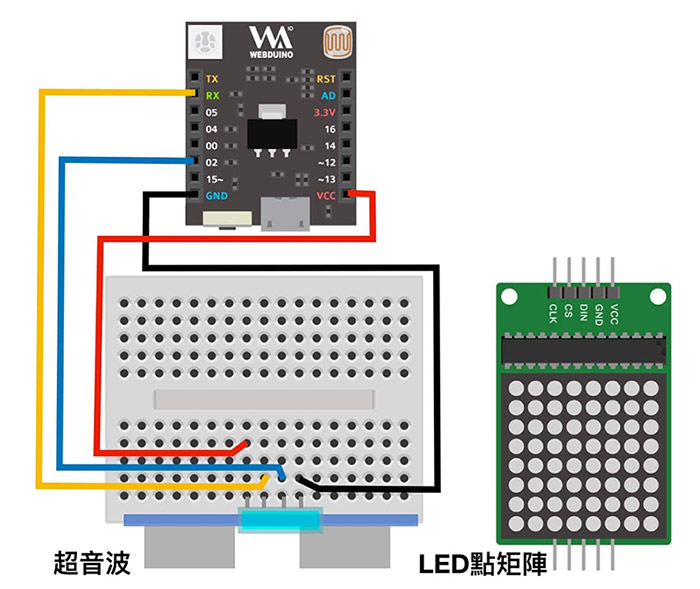
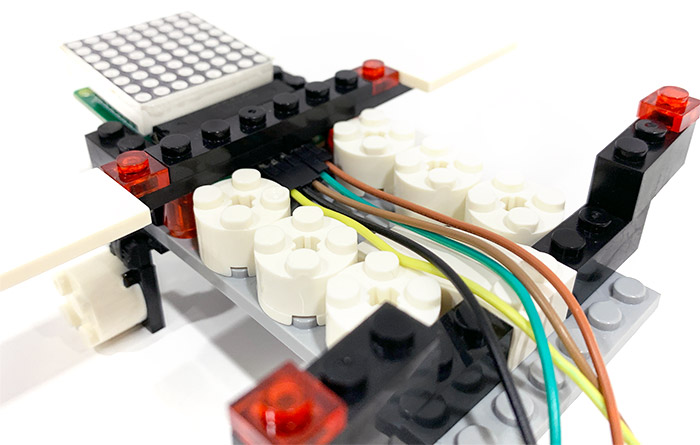
使用 5 條公對母的杜邦線接到 LED 點矩陣上。將 LED 點矩陣拿到飛天車的前方,讓它的接線,朝車體後方,穿過機翼和車體間的空隙。把線從車體後方拉出,將 LED 點矩陣妥善地安置在車頭位置。
再來把飛天車與麵包板電路直接結合起來。
將 LED 點矩陣的電源 ( VCC ) 和接地線 ( GND ),接到麵包板的指定位置上。接著,把杜邦線接到 Smart 開發板上的指定腳位( DIN - 16 , CS - 14 , CLK - 12 ) ,接法如下圖。
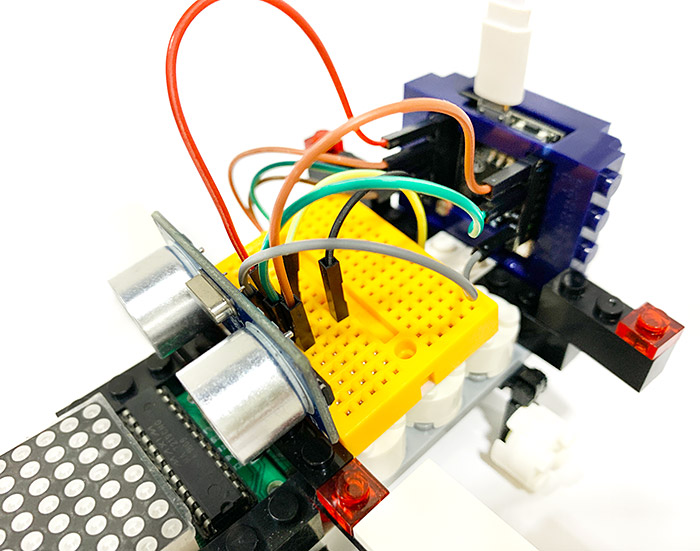
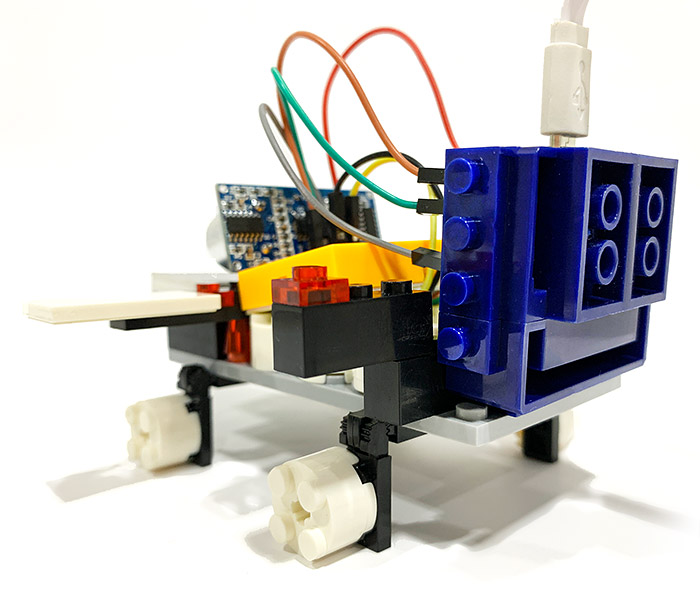
將開發板積木安置在車尾位置,接線部分就完成囉。
積木程式
在畫面中放入開發板積木,開發板下拉選單選擇「 Smart 」,連線方式選擇「 Wi-Fi 」,填入 Device ID。接著,把飛天車所會用到的所有元件的設定積木,全都加入進來,並指定好正確的腳位配置。

如果希望飛天車的測距功能,在我們按下按鈕開關之後,才開始顯示前方障礙物的距離,就必須使用一個名為「 flag 」的變數。在使用者按下按鈕時,將 flag 設定為 1,表示飛天車車進入「測距模式」。當使用者放開按鈕時,flag 就會被設定為 0,表示飛天車進入「休眠模式」。

超音波傳感器是本文飛天車的核心元件,因此我們會把大多數的處理工作,都放進超音波偵測積木裡頭。 需要的積木如圖示。

整個核心處理過程
本文的飛天車有「測距」與「休眠」模式。因此,我們會以這個 flag 變數來進行判斷。當它數值為 1 時,表示飛天車進入「測距模式」。相反,則是進入「休眠模式」,並以 LED 點矩陣顯示笑臉圖案來表示。

當飛天車處於「測距模式」時,LED 點矩陣就會顯示出前方障礙物的距離。 然而,LED 點矩陣礙於顯示限制關係,當距離超過 99 公分以上的話,就只能直接顯示一個圖案來表示超出顯示範圍。

積木都確認好後,就可以按下執行囉。
範例解答 ( 需登入雲端平台 ):https://blocklypro.webduino.io/#kwrP8ZqY3V
相關參考
- 飛天車組裝步驟:飛天車組裝教學
聯絡我們
如果對於 Webduino 產品有興趣,歡迎透過下列方式購買:
個人線上購買:https://store.webduino.io/ ( 支援信用卡、超商取貨付款 )
企業&學校採購:來信 [email protected] 或來電 07-3388511。
如果對於這篇教學有任何問題或建議,歡迎透過下列方式聯繫我們:
Email:[email protected] ( 如對於產品有使用上的問題,建議透過 Email 附上照片或影片聯繫 )
Facebook 粉絲團:https://www.facebook.com/webduino/
Facebook 技術討論社團:https://www.facebook.com/groups/webduino/