自走車 ( 循跡功能 )
在之前「公仔自走車」的範例中,已經了解基本的操作方式,這篇範例將利用「自走車循跡升級套件」,為自走車加上「循跡」的功能,讓我們在一般操作控制之外,也能跟隨地上的軌跡移動,甚至可藉由雲端資料庫的輔助,紀錄軌跡並重複行進同樣的路徑。
循跡自走車操控頁面:https://goo.gl/NrTrLb
Webduino Blockly 範例程式:https://goo.gl/8XYAam
範例影片展示
接線與實作
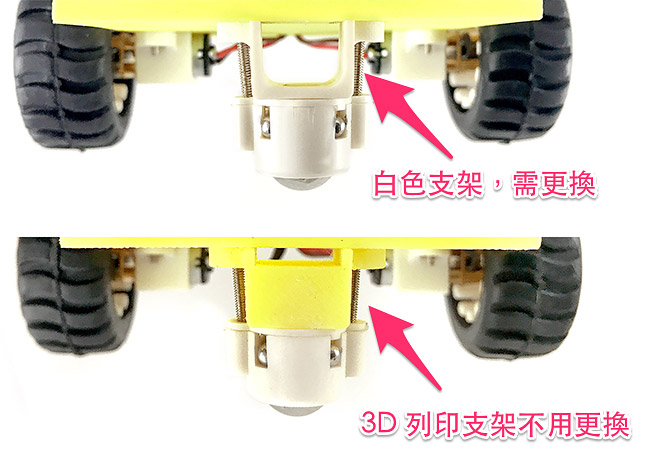
要使用循跡的功能,必須在自走車的機構安裝「循跡控制板」,如果您手邊的 Webduino 自走車為「白色的」萬向輪支架,則必須更換為 3D 列印的支架。如此一來才可以順利組合循跡控制板,若自走車上頭已經是「3D 列印支架」則不用更換。
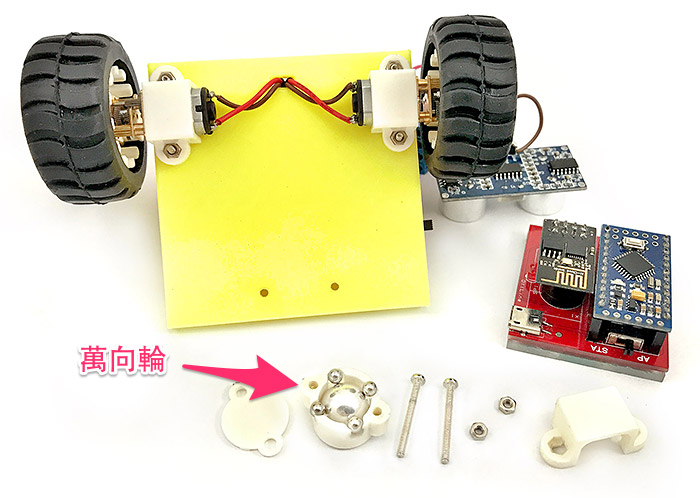
更換的方式很簡單 ( 已是 3D 列印支架可略過組裝教學 ),首先用螺絲起子鬆開支架的小螺絲,取下支架和萬向輪,萬向輪內有四顆小鋼珠和一顆大鋼珠,千萬注意不要弄丟了 ( 建議可用磁鐵放在旁邊吸附著 )。
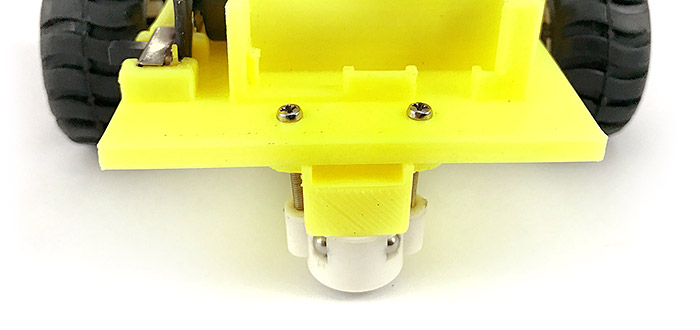
將 3D 列印的支架用原本的螺絲螺帽鎖到車體上,和車體並不會垂直,是正常的現象。
將萬向輪鎖上,車體的改造就完成了。
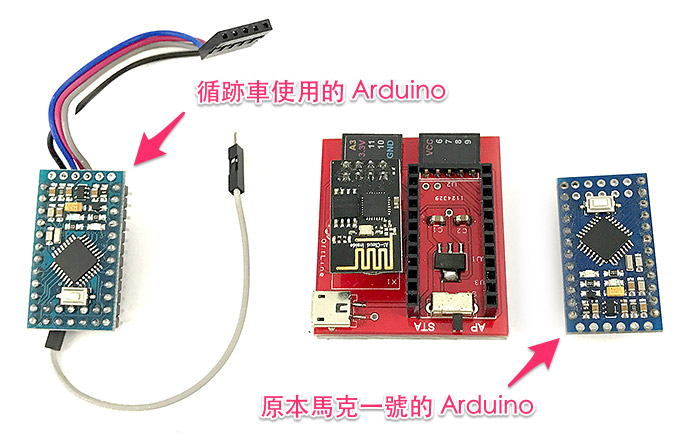
接著移除 Webduino 馬克一號原本的 Arduino Pro mini,換上循跡自走車的 Arduino Pro mini。
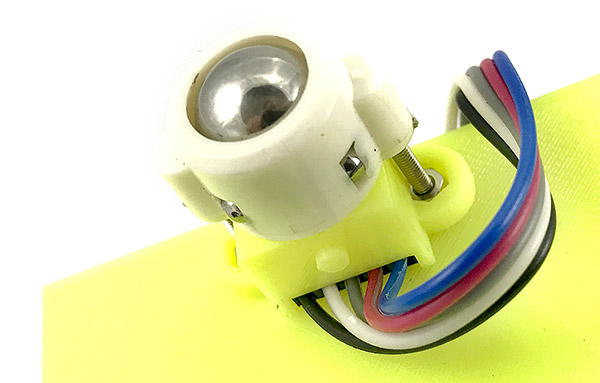
循跡車 Arduino 背面的接線照片如下,如果不小心把線拔除了就按照顏色位置接回去即可。
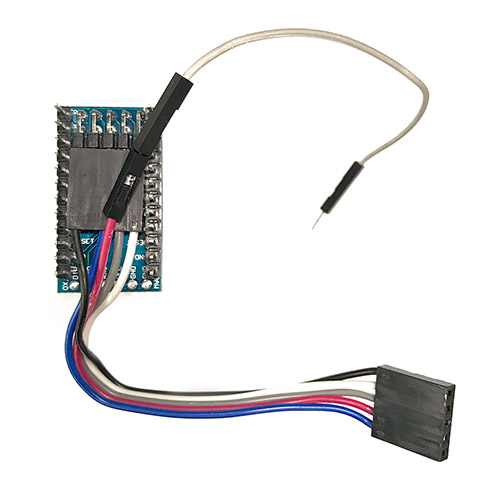
注意換完的方向要正確,五條線的接頭朝下,灰色線接頭朝上。
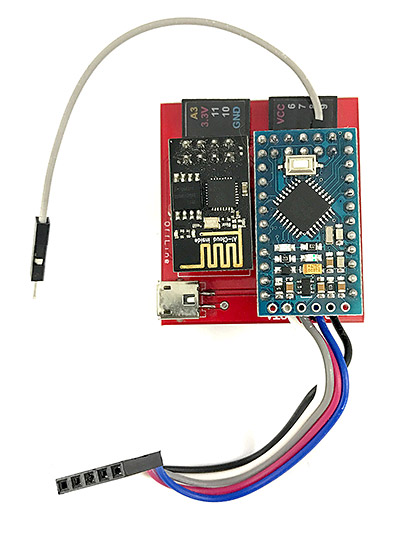
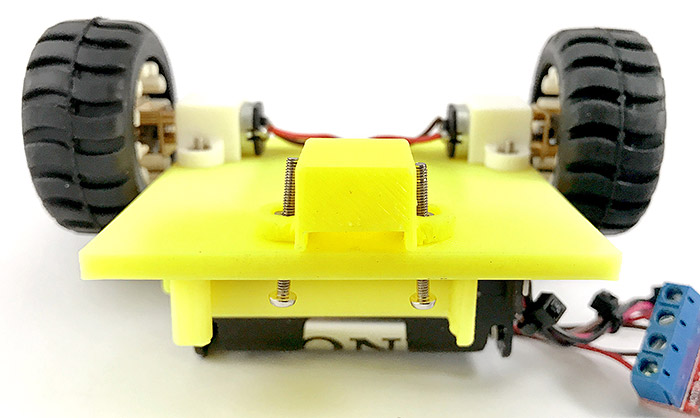
將馬克一號與自走車組合,五條線接頭插入 3D 列印支架的孔洞當中,目的在於要組合循跡控制板。
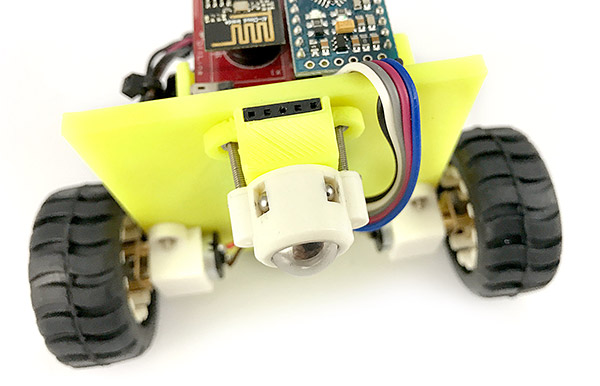
灰色的線則向上和馬克一號 A3 的腳位連接。
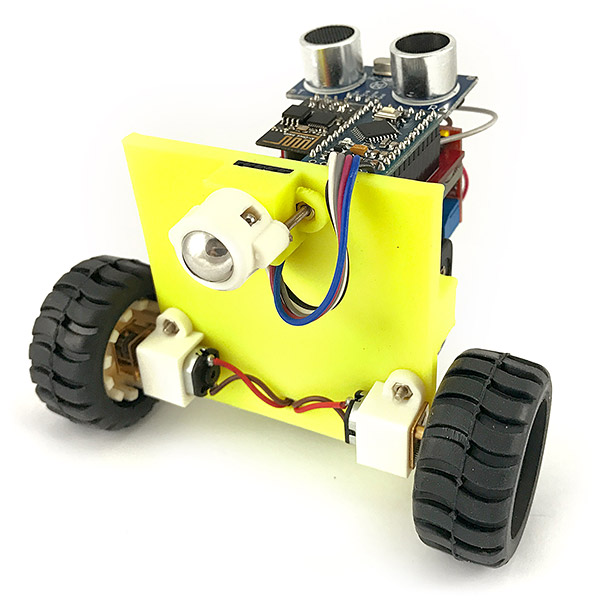
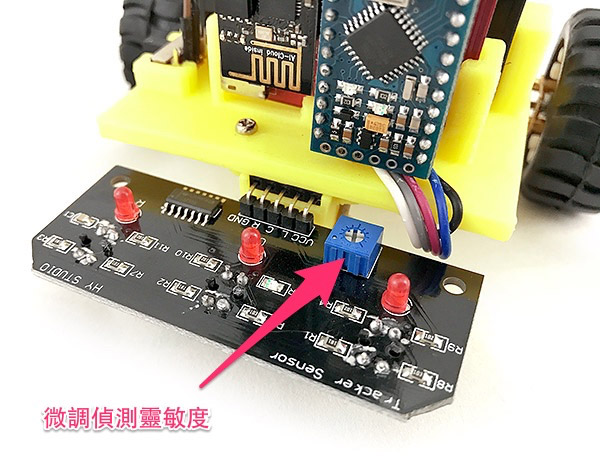
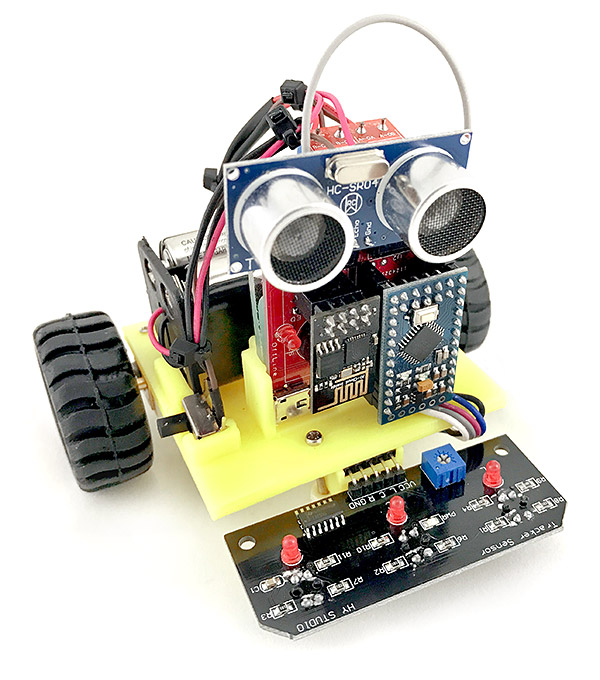
將循跡控制板插入五條線的接頭,如果在運行的時候發現偵測狀況不理想,可使用十字螺絲起子,調整循跡偵測的靈敏度。
最後放入四顆 3 號電池,就完成了 Webduino 循跡自走車的升級改造。
體驗 Webduino 循跡功能
打開 Webduino 循跡自走車操控頁面,在上方填入自走車馬克一號的 Device ID,按下 Connect 連線,連線成功之後,就可以開始使用下方的遙控器循跡與記錄功能。
循跡自走車操控頁面:https://goo.gl/NrTrLb
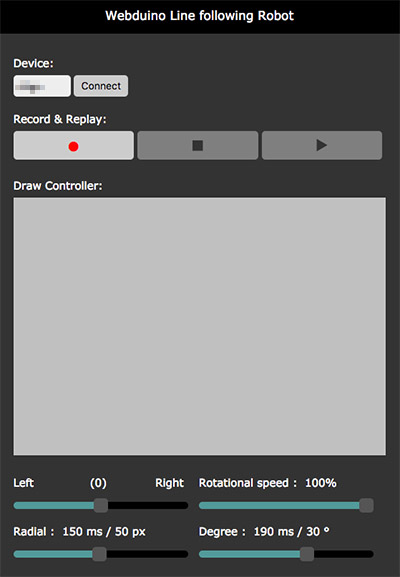
遙控器第一個部分有三個按鈕:
- 第一個按鈕是「循跡與紀錄軌跡」的功能,點選之後就會啟動循跡功能,只要地上有黑色的線 ( 寬度需大於四公分 ),就會跟隨著黑線移動,同時也會開始記錄移動的軌跡。
- 第二個按鈕是「停止」,除了會停止自走車的動作,同時也停止軌跡的紀錄。
- 最後一個按鈕是「播放」,點選之後自走車就會開始運行上一次紀錄的路徑。

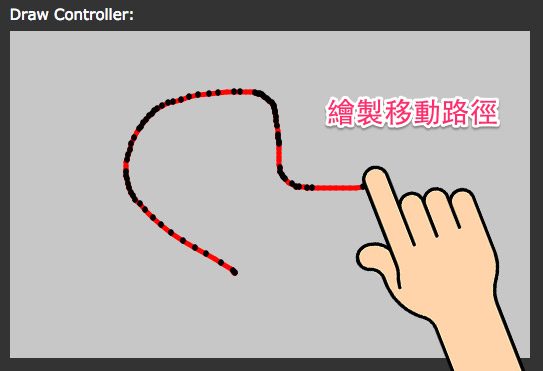
遙控器的第二個部分為「軌跡控制板」,當我們在上面繪製線條圖案,自走車就會跑出我們所繪製的形狀。
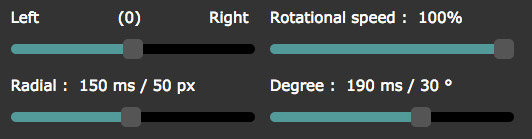
由於每輛自走車的馬達轉速不見得相同 ( 相同型號的馬達轉速也都會有誤差 ),電池的電量也都會有差異,所以在遙控器最後一個部分提供了「設定」功能:
- 拉霸 Around:修正左右偏移量,如果自走車在跑的時候一直向左偏,就往右調整一些
- 拉霸 Rotational speed:表示速度,速度 100% 表示全速行進
- 拉霸 Radial:微調校正速度。假設在 100% 的速度下 150ms 會跑 50px,但實際上卻只跑了 40px,就必須透過 Radial 修正
- 拉霸 Degree:微調修正轉的角度,原理和 Raidal 相同
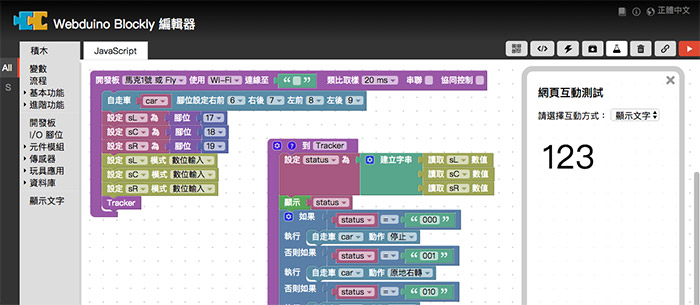
Webduino Blockly 操作
如果不想要用遙控器操作,亦可使用 Webduino Blockly 編輯工具 ( https://blockly.webduino.io ) 實現循跡功能,打開下方的範例網頁,會帶出對應的循跡自走車程式,填入 Device ID,點選右上方的執行按鈕,就會看到自走車沿著黑色路線行進了。
以上就是 2017 Webduino 循跡自走車的組裝與基本操控。
聯絡我們
如果對於 Webduino 產品有興趣,歡迎透過下列方式購買:
個人線上購買:https://store.webduino.io/ ( 支援信用卡、超商取貨付款 )
企業&學校採購:來信 [email protected] 或來電 07-3388511。
如果對於這篇教學有任何問題或建議,歡迎透過下列方式聯繫我們:
Email:[email protected] ( 如對於產品有使用上的問題,建議透過 Email 附上照片或影片聯繫 )
Facebook 粉絲團:https://www.facebook.com/webduino/
Facebook 技術討論社團:https://www.facebook.com/groups/webduino/